24 cell (half the pack) front battery box in 3mm aluminium. Connectors are a Rebling battery connector and TE CPC BMS connector.

24 cell (half the pack) front battery box in 3mm aluminium. Connectors are a Rebling battery connector and TE CPC BMS connector.
A couple of pics of the motor in place. The four original engine mounts are used.

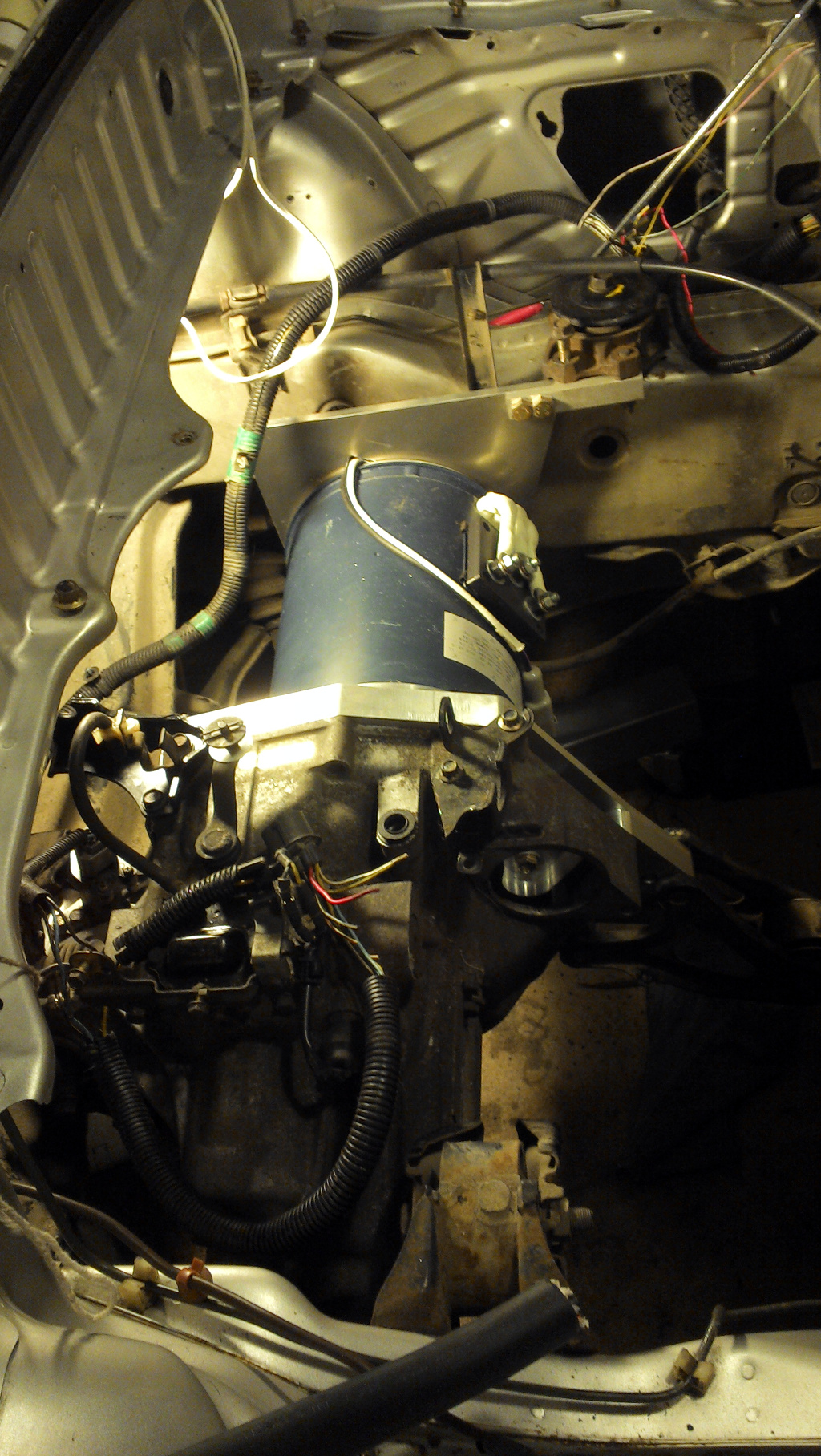
We test-fit the motor yesterday. Only gotchas were the tach cable coming out of the motor, and some interference with the passenger-side cast motor mount. Both can be resolved with a Dremel. Pics to come.
As they say, measure twice, cut once.

Somewhere during the process I inverted the layers and we got a nice plate of aluminium that’s exactly backwards. Oops. Also, bolt holes for the motor were specified too small, and I provided incorrect thread pitch detail on the mating bolt holes. Another detail was it needing a bit of clearance around the drive shaft. We’ll do it again properly.
On a positive note, the Robbins top arrived. I spec’d Stayfast Canvas rather than PVC… looks good but will fit it after the more serious work is done.

Thanks Luke!
The scanning of the original petrol motor done by FormScan in Auckland still blows my mind. It’s extremely accurate, visually impressive, but also fairly easy to work with inside the Rhino 3D software I’m using for modelling.
It was important to get the location of the mounting points right because there just isn’t that much room to work with. The picture below illustrates the situation:
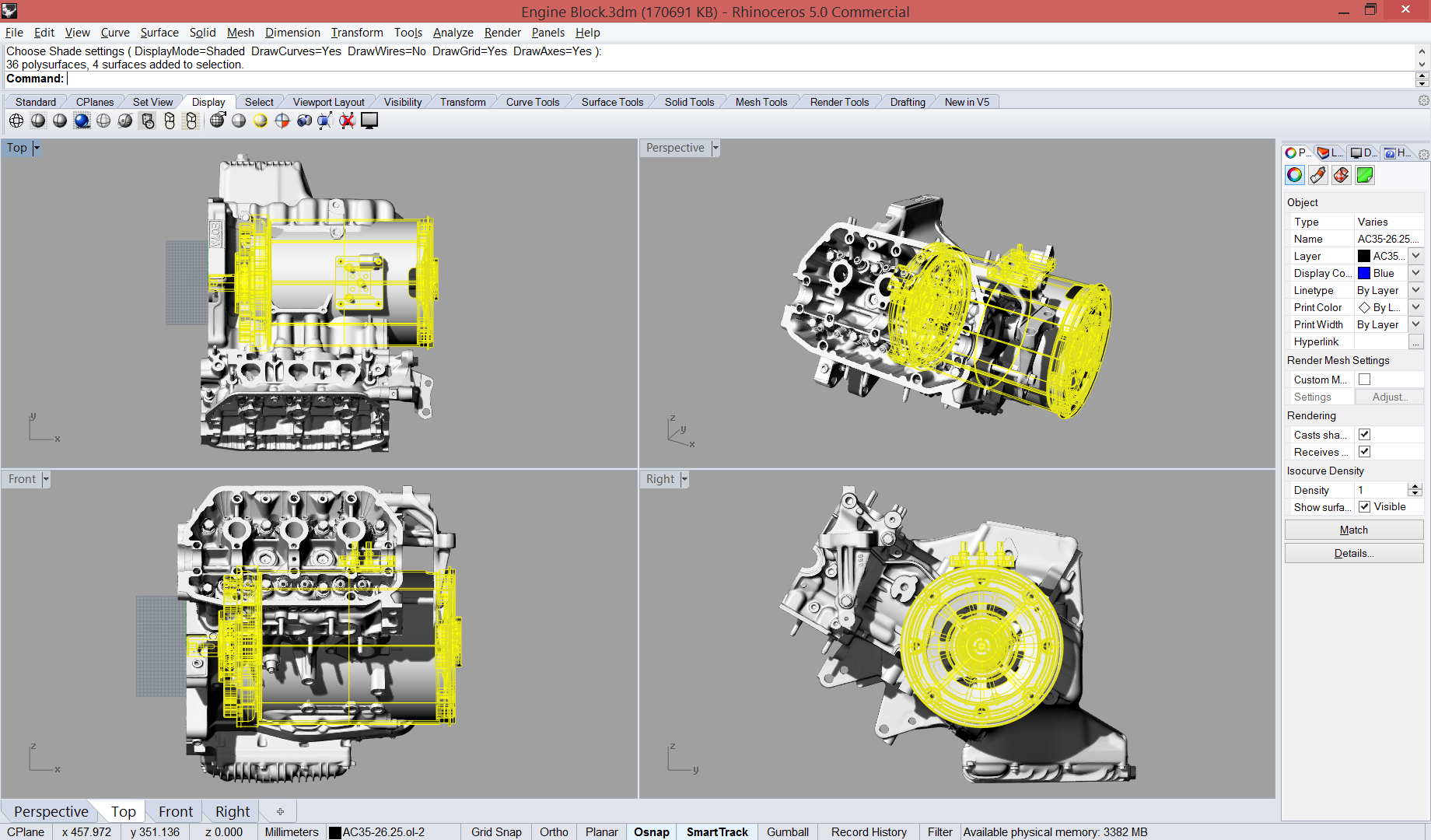
This is the original motor with a regular AC35 motor overlayed. The gearbox input shaft protrudes 1mm past the face, so the output shaft is 1mm back from the gearbox face in this model. However it still doesn’t fit when you look at the side engine mount compared to the end of the motor – and that’s without a mount added, We’re only talking about 7mm or so plus another 5 to 10 for the mount, bolts, etc, but it’s getting into “maybe” territory which usually means not-quite.
So first thought was converting to one of the alternative AC35 motors with internal splines rather than output shaft, but that quickly looked expensive (no case/face conversion, just complete replacement). Next option was input shaft or output shaft modification to create either some space or some overlap…
The motor output shaft has a 7/16″ hole drilled down the centre while the Beat gearbox input shaft is 12mm, so it almost but doesn’t quite fit. That OK because Elektron should be able to drill it out to fit, creating 15mm of additional room. That’s enough to position the motor and mount so it’s within bounds and will fit the Honda engine bay. The 6061 CNC motor plate and mount will be something like this (work in progress.. lots of holes and machining to add):

On a related note, I was trying to figure out how the UK Electro Beat EV managed to fit a Kostov K9 in the same space. Turns out that the Kostov has a 17.5 mm hole in the output shaft already, so drilling out the AC35 maybe isn’t such a hack after all.
The current state of interior controls – steering wheel regen up/down, shifter regen-cut, and econ button obscured by the wheel. Need to revisit all this and reduce the number of driver inputs… It’s 2015 and this stuff should be automagic.

New ITT charger inlet with soft rubber cap fits better than the generic one with the solid plastic hinged lid. Need to acquire a J1772 outlet and adapter to fine tune the position to ensure the charger handle fits in the space OK.


Just kidding. It’s a bespoke shifter knob from EPCO – http://www.epcoshiftknobs.com/
Black with pearl grey racing stripes and 5-speed pattern. The thumb button is swapped from the US-market left to the right for use on the RHD Honda. Typically these are used for drag racing brake line-lock* or as a nitrous oxide* button, but here it’s being used as a “clutch switch” to tell the ECU to disengage regen when shifting.
* YouTube: Mustang Line Lock / Go Baby Go
The steering wheel buttons need a way to connect to a something that converts their momentary presses to an analogue value, and the momentary Honda Econ button needs a way to become a latching switch.
Arduino + XBee to the rescue.
Everyone knows Arduino – Atmel MCU on a standardised board with simplified programming environment. Reading inputs and latching outputs or driving PWM or a DAC are fairly straight forward. Things like CAN bus shields (add-on boards) come in handy when integrating with existing networks and displays such as the BMS / OBD2 network. But what’s XBee? It’s a small module that makes wireless IO and serial transmission super easy.
Wireless? Yeah, because having those spiral cables the race guys use to connect the steering wheel buttons is kinda annoying for a street car. The little XBee module can sit behind the bottom spoke of the steering wheel and wake up to send button presses to the peer XBee connected to an Arduino module behind the new console panel. Just have to optimise for power consumption and rig up an LED or something to warn when the battery needs replacing.
The Arduino with CAN bus shield can send CAN bus messages for Regen value and Econ mode for Torque to display.

